แนวโน้มผลงานของพุฒิพงศ์์
Journal

บทความของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
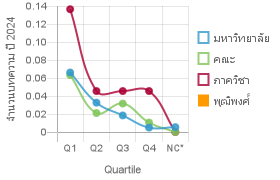
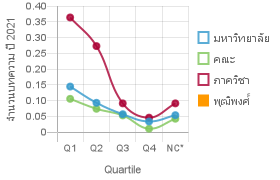
บทความแต่ละ Quartile ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล

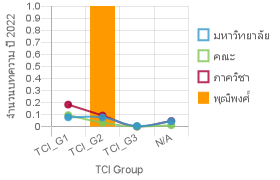
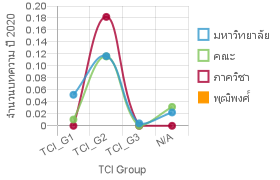
บทความแต่ละ TCI Group ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
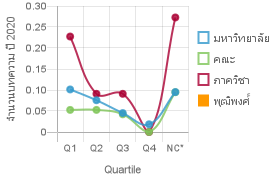
บทความแต่ละ Quartile ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
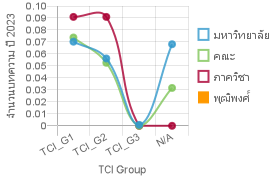
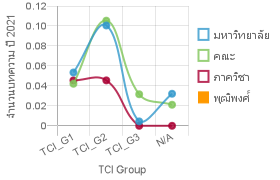
บทความแต่ละ TCI Group ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล

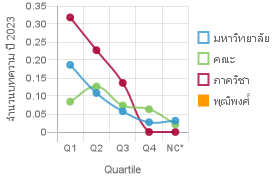
บทความแต่ละ Quartile ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
บทความแต่ละ TCI Group ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
บทความแต่ละ Quartile ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
บทความแต่ละ TCI Group ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
บทความแต่ละ Quartile ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
บทความแต่ละ TCI Group ของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
| Publish Year |
National Journal |
2 |
| 2022 |
 นายพุฒิพงศ์์ ขุนทรง, อาจารย์ นายพุฒิพงศ์์ ขุนทรง, อาจารย์ , ดร.พงศกร บำรุงไทย, ผู้ช่วยศาสตราจารย์, ดร.ประภาพรรณ เกษราพงศ์, ผู้ช่วยศาสตราจารย์, นายทรงชัย จิตภักดีบดินทร์, อาจารย์, ดร.กิตติพงษ์ เยาวาจา, ผู้ช่วยศาสตราจารย์ , ดร.พงศกร บำรุงไทย, ผู้ช่วยศาสตราจารย์, ดร.ประภาพรรณ เกษราพงศ์, ผู้ช่วยศาสตราจารย์, นายทรงชัย จิตภักดีบดินทร์, อาจารย์, ดร.กิตติพงษ์ เยาวาจา, ผู้ช่วยศาสตราจารย์ , ,  รุ้งเพชร สงวนพงษ์, น้ำผึ้ง ปุญญนิรันดร์, "ระบบวัดค่าจุดศูนย์กลางความดันแบบเวลาจริงสำหรับประเมินความสามารถในการทรงตัวในผู้สูงอายุ", วารสารวิทยาศาสตร์และเทคโนโลยี หัวเฉียวเฉลิมพระเกียรติ, ปีที่ 8, ฉบับที่ 2, กรกฎาคม - ธันวาคม 2022, หน้า 68-80 รุ้งเพชร สงวนพงษ์, น้ำผึ้ง ปุญญนิรันดร์, "ระบบวัดค่าจุดศูนย์กลางความดันแบบเวลาจริงสำหรับประเมินความสามารถในการทรงตัวในผู้สูงอายุ", วารสารวิทยาศาสตร์และเทคโนโลยี หัวเฉียวเฉลิมพระเกียรติ, ปีที่ 8, ฉบับที่ 2, กรกฎาคม - ธันวาคม 2022, หน้า 68-80 |
| 2019 |
ดร.กิตติพงษ์ เยาวาจา, ผู้ช่วยศาสตราจารย์, Yuttasak Promtaen, นายบุญธรรม วงศ์ไชย, ผู้ช่วยศาสตราจารย์, นายพุฒิพงศ์์ ขุนทรง, อาจารย์, "Prototyping and Control of a 2-DOF Serial Flexible-Joint Robot by using Fuzzy Control System", Journal of Research and Applications in Mechanical Engineering, ปีที่ 7, ฉบับที่ 2, มิถุนายน - ธันวาคม 2019, หน้า 134-144 |
Conference

การนำเสนอบทความของพุฒิพงศ์์ เปรียบเทียบกับค่าเฉลี่ยของนักวิจัยใน มก. ในคณะวิศวกรรมศาสตร์ ศรีราชา และในภาควิชาวิศวกรรมเครื่องกล
| Publish Year |
National Conference |
1 |
| 2019 |
ดร.กิตติพงษ์ เยาวาจา, ผู้ช่วยศาสตราจารย์, Yutthasak Promtaeng, นายบุญธรรม วงศ์ไชย, ผู้ช่วยศาสตราจารย์, นายพุฒิพงศ์์ ขุนทรง, อาจารย์, "Prototyping and Control of a 2-DOF Serial Flexible-joint Robot by using Fuzzy Control System", การประชุมวิชาการเครือข่ายวิศวกรรมเครื่องกลแห่งประเทศไทย ครั้งที่ 33, 2 - 5 กรกฎาคม 2019, เมือง อุดรธานี ประเทศไทย |
Copyrights
การจดลิขสิทธิ์ 1 ปีล่าสุด
| Publish Year |
International Copyrights |
1 |
| 2022 |
ดร.ประภาพรรณ เกษราพงศ์, ผู้ช่วยศาสตราจารย์, นายพุฒิพงศ์์ ขุนทรง, อาจารย์, ดร.พงศกร บำรุงไทย, ผู้ช่วยศาสตราจารย์, ดร.กิตติพงษ์ เยาวาจา, ผู้ช่วยศาสตราจารย์, รุ้ง สงวนพงษ์, น้ำผึ้ง ปุญญนิรันดร์, "โปรแกรมประเมินความสามารถในการทรงตัว", Kasetsart University, 2022 |
[ที่อยู่สำหรับนำเพจไปอ้างอิง https://research.ku.ac.th/forest/OutputByPersonEx.aspx?ID=570018]